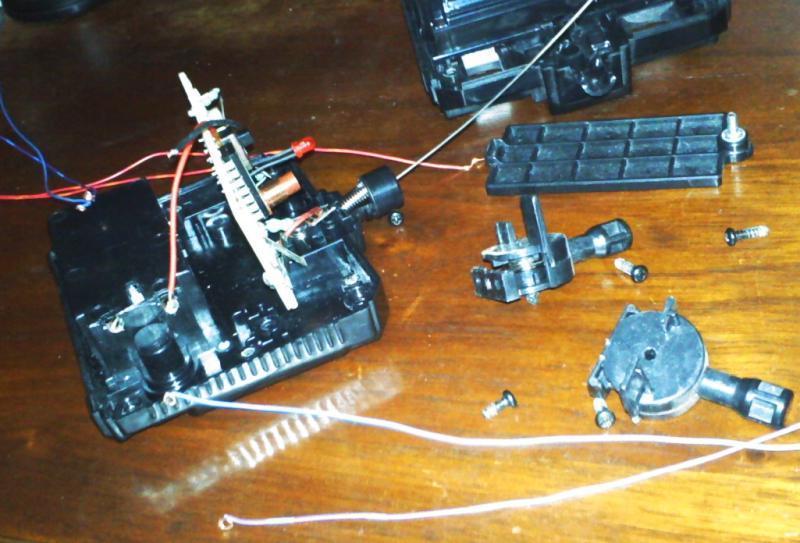
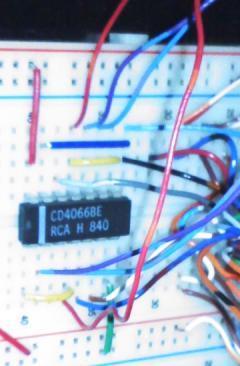
| Find a route for wires in/out of remote and solder a wire to each common spring and the four post on bottom of PCB. Then decide which output pins of what port you are going to use for your RC and make a connection to your circuit, or use solderless proto board for this test. Using a CD4066BE switch makes it an easy design at a very low cost. 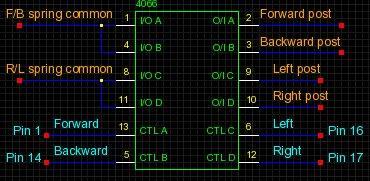 Corvette RC was only like $16-18 and worth the money just for components. |
 |